
Adventures and ramblings in rocketry and embedded development.
Sunday, October 26, 2014
Slight delay due to fried parts, drop test update
I will be delayed in the development of the system on the code side due to the loss of my MPU-6050. The magic blue smoke of failure made a surprise appearance yesterday. I connected it to the 5V pin of the Arduino and suddenly wisps of smoke wafted past my screen as the power LED dimmed and powered off. I tested the temperature of the components and found the voltage regulator to be at fault. I did not over voltage it as it was rated to 5V. Likely the component was either faulty or it might have been a low quality wafer. The replacement components will be arriving in a few weeks (they have to get here from the opposite side of the planet) so until then I will be working on the physical structure of the drop test module for the test before the end of the year. Currently my objective is to secure a location from which to drop the unit from as so it can get up to the proper airspeed for the fins to come into play and control the fall of the unit. Initially I had called the local university as they have tall buildings which the town I live in does not (aside from the precinct which will not let me drop things off their roof). The administrator I talked to was extremely helpful and asked around as to wether or not I would be able to use their facilities. I was unable to use the facilities due to their insurance policies and the fact that the roof membranes are rather fragile, however he did give me several other places to ask which will hopefully allow me to test this system.
Tuesday, October 21, 2014
Update on active stabilization system [Apologies for hiatus]
//Back again with another update! Many apologies for the extended hiatus, school is quite hectic with it being my final year and the heavier workload of AP Physics and trying to maintain a relatively good GPA in addition to some other unrelated things going on that weighs rather heavily on my time, thanks for your understanding.
Back in the beginning of September I had started work on taking a prototype shield (these) and soldering the circuits on the back using standard hook up wire and converting it into a guidance shield for easier demonstration purposes and to minimize the rats nest of loose wires hanging out all over the place. This increased the durability of the entire system but hit a major hardware snag when it did not work as it did on the breadboard. The issue was it started moving the servos a single tiny skip then shutting the whole system down. What was happening is that the servos were drawing far too much current for the 5V pin and the Arduino shut down to protect itself as it thought it was short circuiting, not an I2C bus issue as I first surmised. I figured it out at last earlier this week, when I used an additional power supply for the servos (lots of power required to move 4 of them simultaneously). This fixed the biggest hardware problems I was having with a minimal amount of changes required to my circuitry (will need only an additional regulator) and no major changes to the code (will be moving the servo pins to PWM next revision). When you encounter an issue, first thing to check is for shorts, then to see if something else has gone wrong such as a misplaced connection or a solderblob jumped terminal that should not be connected.
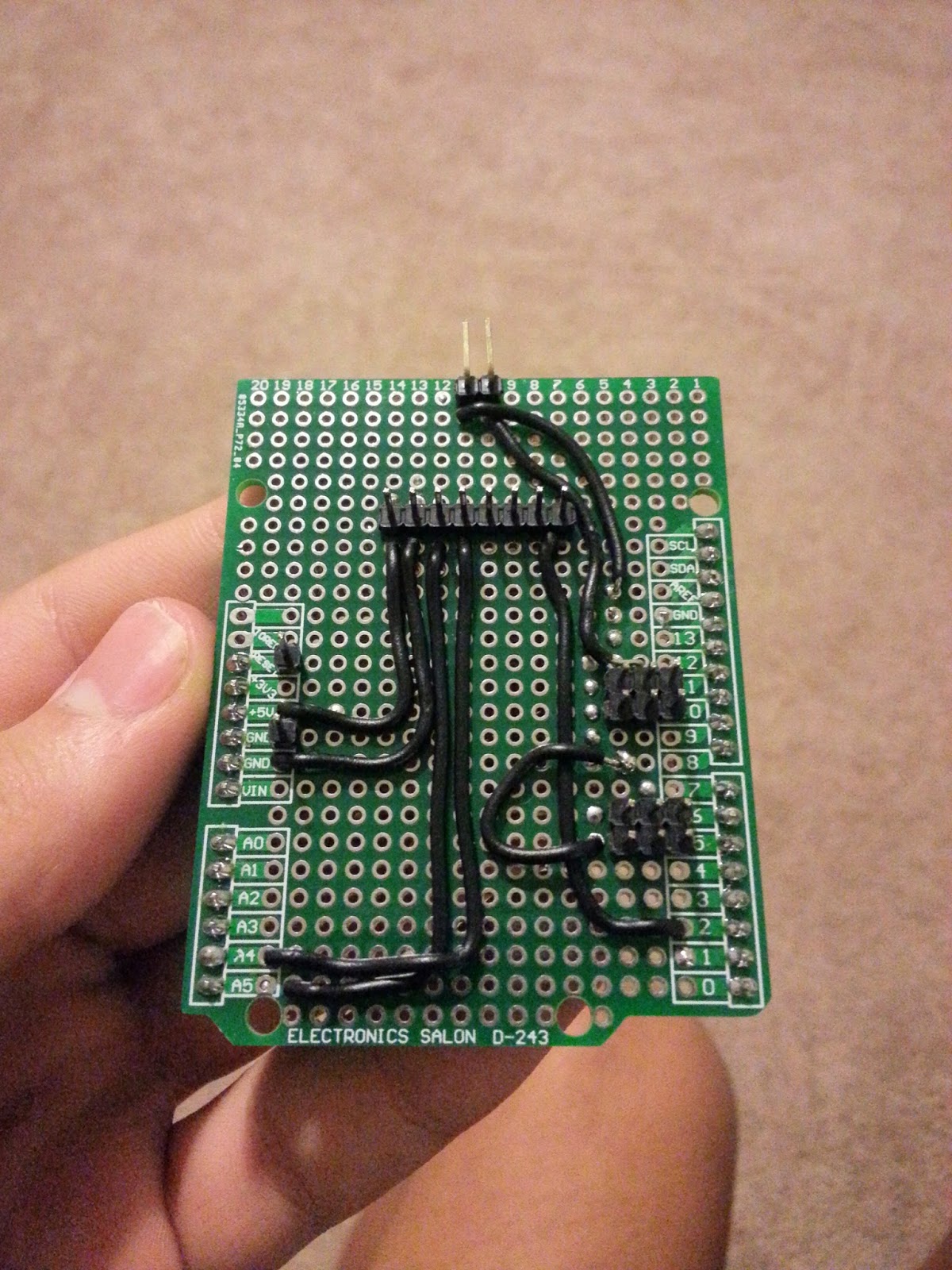 |
| Shield top, not so great wire layout |
Subscribe to:
Comments (Atom)